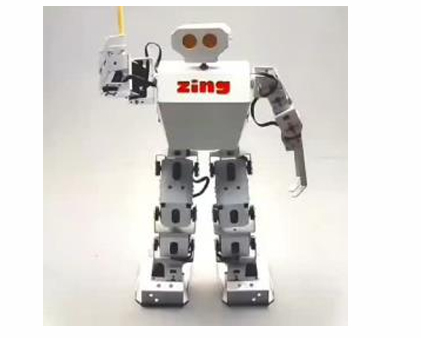
Overall 12-DOF, multi connecting rods leg design, increasing the servo effective
torque A real-time operating system is used as a controller for connecting rod inverse solving and gait generation, sharing calculating task for the host controller and improving the gait solving efficiency